22/02//2019
This is week 4 of five-weeks long project.
Last week, we requested a stand for the projector and kinect hence the mechanic came in and took the measurement of the sandbox.
The new stand has arrived this week and we immediately equipped it with a new projector and Kinect .
It has more flexibility than the tripod we had before. the Xbox Kinect is positioned right above the sandbox and centered so that it can detect every point in the box so it will prevent blind spot.
We adjusted the position of the sandbox so the image the projector produce fills the entire sandbox.





 This is the first time we have used the new projector with the computer, we have noticed a dramatic difference in the image both projectors created.The image is now brighter, has a richer color and still visible with the lights turnt on.
This is the first time we have used the new projector with the computer, we have noticed a dramatic difference in the image both projectors created.The image is now brighter, has a richer color and still visible with the lights turnt on.






Measuring and getting the optimal distance between the sensor and the sandbox.

The left image shows the process of calibration which is required to prepare an image
(in our case a continuous live image capture) for subsequent data extraction and analysis, fixes tiny defects in the camera sensor or an optical system. Meanwhile, the projector is running some calibration test patterns.





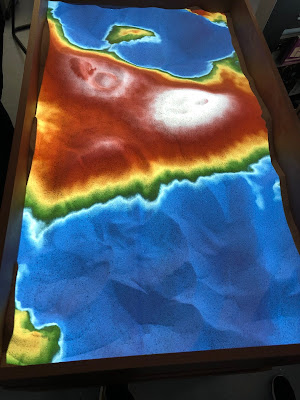
We slightly change the color presentation of the height, the tallest point it can achieve is white as usually places with a high attitude is extremely cold andcovered in snow.



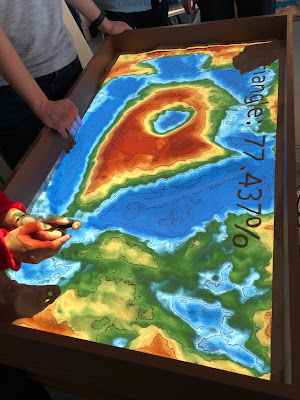
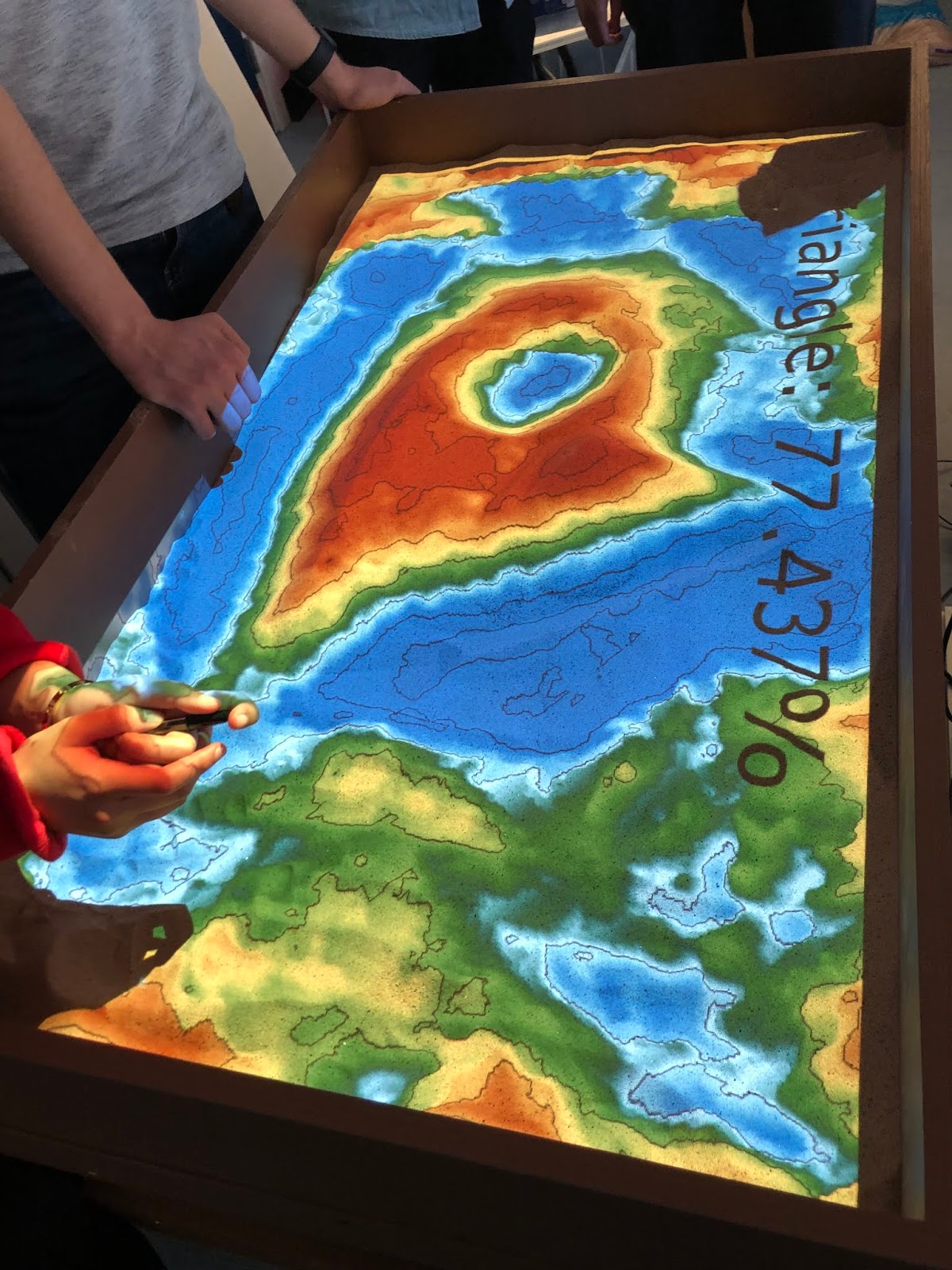
The contour lines between the colors show the slight height differences the sensor sees.
This is flooding, the water level slowing rising,and until it covers the entire landscape.

Later on, we had switched the theme, we brought in some props to make the lunar theme more realistic and see what can be improved.
We also had a go with the games the other team developed.It is a game that we need to match the shape the system gave you on the sand,and score you based on similarity .


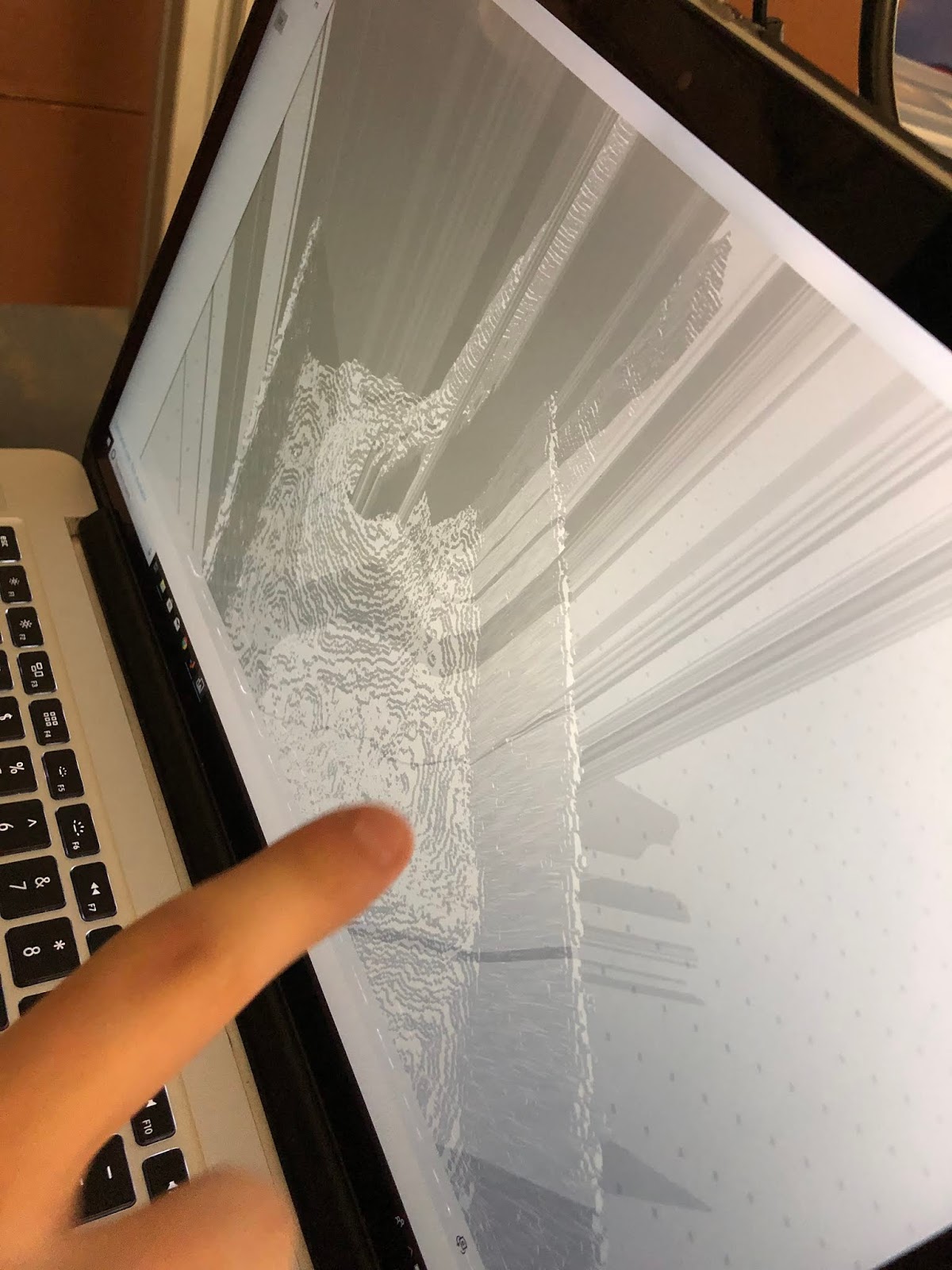
We used the Xbox Kinect to create a 3D image of the entire sandbox, and we can utilize this data to 3d print an exact model of the sandbox
In the two pictures above, you can clearly see an arm belongs to one of our groupmates!!!
Next week, we will attempt to print a real-life 3D model based on the graphics data Kinect retrieve from the surface of our sandbox using MATLAB
Comments
Post a Comment